Our work to map and collect information on seabed character and composition is critical for almost every aspect of coastal and marine management. To manage an area we need to know what is there, how it is similar or different to other areas, and what makes it unique.
Our mapping work helps:
- manage coastal erosion and inundation
- manage and protect marine habitats and ecosystems
- better understand marine biodiversity and support marine conservation
- undertake marine research and coastal structural design
- develop models to better understand the distribution of sediments across the seafloor and how they move
- develop and improve models to predict nearshore wave and currents, which supports management of coastal hazards
- manage emergency responses.
SeaBed NSW Program and map viewer
The SeaBed NSW Program is continuing to deepen our understanding of the coast and seafloor. We have been working to:
- improve our mapping coverage of subtidal areas
- continue collecting data on the structure and composition of the seabed adjacent to our beaches
- map sea floor bathymetry (topography)
- classify underwater landforms.
Funded as part of the NSW Coastal Reforms package, the program builds on research expertise and specialist capabilities developed in 2005. The high-quality data we generate is improving modelling and we are gradually mapping seabed habitats across our marine estate.
We combine airborne laser mapping in shallow water and vessel-based multi-beam sonar further offshore. The mapping is then validated or ‘cross-checked’ with sediment (grab) samples that we collect and analyse, and underwater video we record using specialist equipment onboard our research vessel RV Bombora.
Digital model
The goal of the project is to develop a continuous high-resolution digital elevation model for the entire NSW marine estate. The model will:
- build significantly on our existing database
- provide a more accurate 3D surface for the wave modelling tools we use in our ocean and coastal wave research
- improve our understanding of how sand moves around the coastal–marine environment
- provide baseline information, including marine habitats, from which we can measure change
- support management of marine protected areas by the Marine Estate Management Authority.
The bathymetry data we have collected so far as part of the Seabed NSW program allows us to visualise the seafloor in a level of detail not seen before.
Marine LiDAR data has been digitally rendered onto a map of New South Wales and can be accessed with this map viewer on our SEED portal.
Landform classification
The bathymetry data we collect reveals the shape of the seafloor (terrain or geomorphometry) and this enables us to classify mapped areas into a series of landform ‘types’. For example, peaks, reefs, channels and plains.
This is one interpretation of seabed composition and structure, and is called a ‘surrogate’ dataset. It is indicative of the different marine habitats that exist along our coast. We cannot scuba dive or drop cameras on every square metre of seabed, but this is the next best thing.
The NSW State-wide Landform Classification, which has been developed as part of the program, captures this dataset on a map of New South Wales, which this map viewer provides access to.
About the SeaBed NSW Program
Watch this video to find out more about our SeaBed NSW Program.

How we collect data
We use different technologies to ‘see’ through the water column, map the seabed and collect basic information on the nature of the seafloor.
Sonar
We use sonar equipment on research vessels, jet skis and quad bikes to determine seabed depth and reflectivity.
Sonar systems bounce sound off the seabed. Each wave of sound is called a ‘ping’.
Systems designed to detect the ‘returned’ ping from a single downward angle directly beneath a vessel are called ‘single beam’ sonars. ‘Multibeam’ sonars detect at multiple angles and receive the sound in a fan-shape or ‘swath’. Pings of sound are released one at a time, but can be generated up to 10–15 times per second depending on water depth.
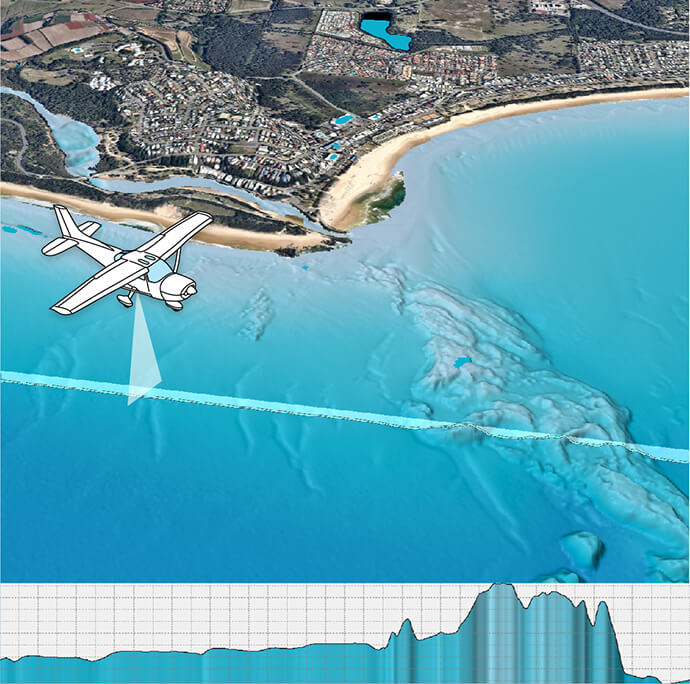
Aerial photography and laser
Through partnerships, we access airborne mapping technologies using lasers (marine LiDAR) mounted on small planes. This technique collects detailed seabed maps of depth and reflectivity from the nearshore zone and the beach to depths of 30–35 metres. In the past we have relied on aerial photography or satellite imagery to identify areas of reef and sand where the water is shallow and clear.
Video
We collect underwater video footage by towing a camera close to the seabed.
This data allows us to:
- validate the seabed maps from the sonar with visual samples
- identify the diversity of marine life living on or near the seafloor characterise benthic reef communities, and if we are able to repeat these surveys at regular intervals, determine how benthic communities may change over time.

Sediment samples
The seabed is not just a large area of sand. It can contain a large range of different types of sediments including:
- shells
- coral rubble
- pebbles from ancient rivers
- mud from estuaries
- fine-grained silt shaped into plains, banks, ripples and waves.
Our multibeam sonar can map these different sediment areas, but we also need to collect sediment samples from the seabed to help validate the sonar and analyse the composition of the seabed surface.
Our sampling system, called a ‘grab sampler’, acts like a set of jaws which snap shut when it reaches the seabed and capture a sample of the sediment.
This is how we can match the mapped distribution of sediments across the seafloor with what the sediment is made of; that is, sand, mud or gravel. This is important because it tells us how the sediments may move around within a beach and between beaches, and where it originated from.
How to access our data
Go to:
- the Sharing and Enabling Environment Data portal for metadata and data quality statements for our mapping
- the Australian Oceanographic Data Network for most of our single- and multi-beam data
- Geosciences Australia’s ELVIS (Elevation Foundation Spatial Data) portal for marine LiDAR data.